| .. | ||
| EnvironmentSensor | ||
| Properties | ||
| Telemetry | ||
| appsettings.Development.json | ||
| appsettings.json | ||
| GrpcStartup.cs | ||
| ISensor.cs | ||
| NucuCar.Sensors.csproj | ||
| Program.cs | ||
| Readme.md | ||
This application will read sensors data periodically, provide access to it via gRPC and publish telemetry to the cloud.
Installation How-To
- Build the module and target the Raspberry Pi.
- Copy the files over to the Raspberry Pi.
- Modify
appsettings.jsonto fit your needs. - Install the hardware.
Wiring
You may download the Fritzing diagram from Docs/fritzing/nucucar.sensors.fzz
in order to play with it.
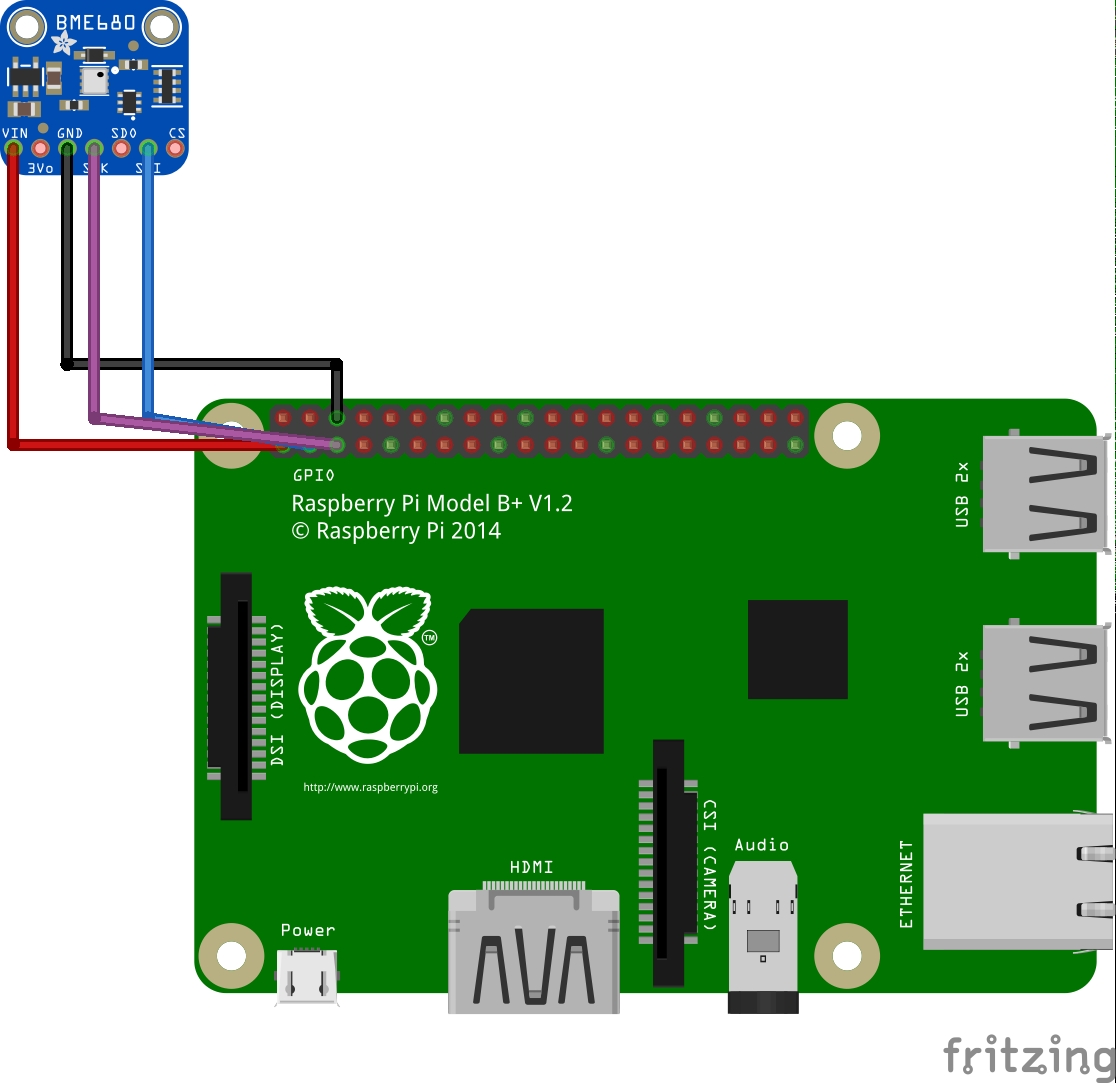
BME680
Connect the BME680 sensor to the I2C bus 1 (I2C.1) of the Raspberry Pi.
The address 0x76 will be used to communicate with the sensor.
5. Run the application.
Environment Sensor
Worker service for the BME680 environmental sensor from Bosh.
Sensor capabilities:
- Temperature
- Barometric Pressure
- Humidity
- VOC Gas (Currently not implemented in binding)